400-808-1418
400-808-1418
我在哪?-定位系统
艾吉威AGV核心定位模块,根据周围环境、已知地图和里程计信息, 获取实时准确的位姿信息(x,y,θ)。
艾吉威AGV核心定位模块,根据周围环境、已知地图和里程计信息, 获取实时准确的位姿信息(x,y,θ)。

技术
为客户提供一站式室内外智慧物流解决方案
艾吉威率先推出移动机器人无反射板激光自主导航技术,使机器人无需任何标识(反射板\二维码\磁条),成为自由移动机器人。
其原理是通过原始地图和有效地图的建立,实现 AGV 行进过程中的建图和定位计算。拥有智能学习能力,通过不断地记忆运行环境,
根据当前扫描到的环境与记忆中的运行环境匹配来识别自身的位置,不受反射板等限制,节省施工成本和时间。
艾吉威率先推出移动机器人无反射板激光自主导航技术,使机器人无需任何标识(反射板\二维码\磁条),成为自由移动机器人。
其原理是通过原始地图和有效地图的建立,实现 AGV 行进过程中的建图和定位计算。拥有智能学习能力,通过不断地记忆运行环境, 根据当前扫描到的环境与记忆中的运行环境匹配来识别自身的位置,不受反射板等限制,节省施工成本和时间。
艾吉威AGV核心定位模块,根据周围环境、已知地图和里程计信息, 获取实时准确的位姿信息(x,y,θ)。
艾吉威AGV核心定位模块,根据周围环境、已知地图和里程计信息, 获取实时准确的位姿信息(x,y,θ)。


机器人自建地图后,特定目标点,根据系统维护的当前多车运行的工况,以机器人起始点,目标点计算具体的期望路线,与交通管制相关联。
机器人自建地图后,特定目标点,根据系统维护的当前多车运行的工况,以机器人起始点,目标点计算具体的期望路线,与交通管制相关联。
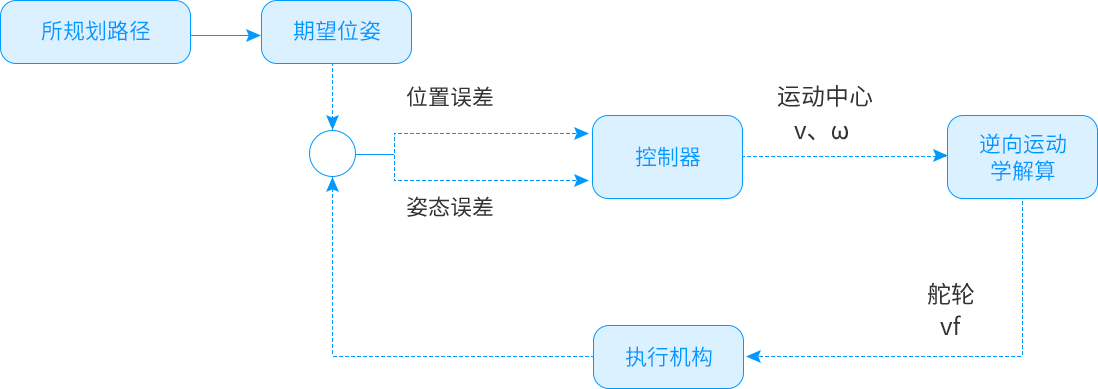
艾吉威AGV核心控制模块,根据当前规划的任务信息、移动机器人的位置信息,
实时控制移动机器人的运动,保证移动机器人稳定、协调、高效的完成各种任务。根据B样条路径动态规划动态选取型值点,以根据型值点计算得到控制点。采用PID控制方法,消除位姿误差,控制机器人按期望路径运动。
艾吉威AGV核心控制模块,根据当前规划的任务信息、移动机器人的位置信息, 实时控制移动机器人的运动,保证移动机器人稳定、协调、高效的完成各种任务。根据B样条路径动态规划动态选取型值点,以根据型值点计算得到控制点。采用MPC控制算法,消除位姿误差,控制机器人按期望路径运动。

超强自我学习、自我优化,
其环境轮廓导航,精度达±5mm
超强自我学习、自我优化,其环境轮廓导航,精度达+5mm

快速避让障碍物,
当原路径被完全封闭后,自我
发现新路径而无需人工干预。
快速避让障碍物,当原路径被完全封闭后,自我发现新路径而无需人工干预。

超强自我导航算法及激光扫描
仪识别障碍物
超强自我导航算法及激光扫描仪识别障碍物


全国统一热线
400-808-1418
苏州工业园区展业路8号中新科技工业坊1B